什么是 OLO Robotics?
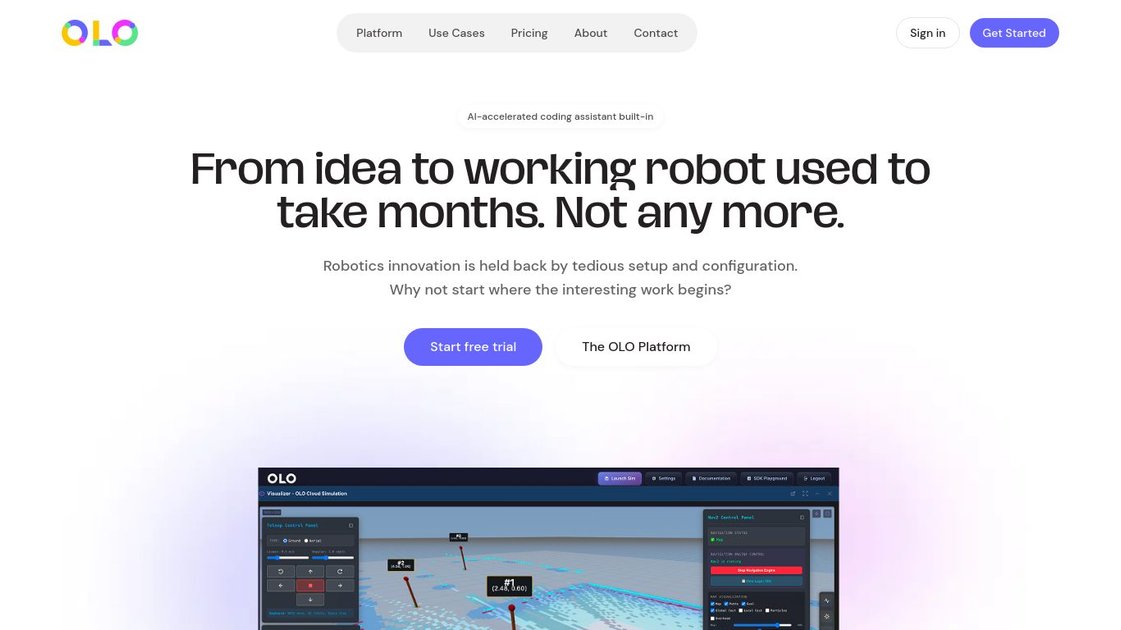
OLO Robotics 是一个基于浏览器的机器人平台,将仿真、可视化、控制、脚本编写和 ROS2 访问集成在一个地方。它旨在减少启动机器人应用构建和测试通常需要的配置工作,让团队能够在单一 Web 环境中从想法快速推进到可运行的机器人。
该平台包含 AI 加速的编码助手、JavaScript 和 Python SDK、实时视频流、远程操控、自主导航以及 ROS bag 录制。它还支持直接访问 ROS2 主题、服务和参数,因此适合需要共享机器人开发与运维工作流的开发者、研究人员和硬件厂商。
主要功能
- 基于浏览器的机器人工作区,将仿真、可视化、控制和脚本编写整合到一个平台中,减少拼接多个独立工具的需要。
- 原生 ROS2 访问,可直接与主题、服务和参数交互,用于构建和调试机器人工作流。
- AI 辅助编程,内置编码助手,并提供 JavaScript 和 Python SDK 用于脚本编写和应用开发。
- 远程机器人控制,支持低延迟远程操控,可通过 Web 平台从任何地方操作。
- 来自机器人摄像头的实时视频流,支持录制和回放,便于检查和审阅。
- 导航与操作工具,包括内置 Nav2 集成,用于航点和位姿导航,以及机器人手臂的关节控制。
- ROS bag 录制和回放,用于测试、调试和重放机器人数据。
- 脚本编排,将可复用的自动化步骤串联为模块化工作流。
如何使用 OLO Robotics
用户通常先打开 Web 平台或 SDK Playground,选择要使用的环境和机器人,然后连接到 ROS2 数据和控制。之后,他们可以在 AI 助手的帮助下编写代码,运行 JavaScript 或 Python 脚本,监控视频和机器人状态,并通过仿真或直接控制测试行为。
团队还可以使用该平台录制 ROS 主题、回放会话,并在不先搭建本地机器人技术栈的情况下,迭代导航、远程操控或视觉任务。
使用场景
- 机器人开发者在浏览器中原型化控制逻辑,借助 SDK 和 AI 编码助手,无需漫长的本地配置即可从概念走向可用行为。
- 硬件 OEM 为客户提供现成的软件层,用于视频流、导航和控制,让他们可以专注于机器人本身。
- 研究团队为学生和员工提供标准化实验环境,减少安装和配置机器人工具所花费的时间。
- 操作员使用实时视频、低延迟控制和机器人手臂关节操作来测试远程远程操控工作流。
- 工程师在测试期间录制 ROS 主题,然后回放它们以调试行为或比较不同运行的结果。
常见问题
OLO Robotics 需要本地安装吗? 来源将其描述为基于浏览器的平台,并说明 SDK Playground 不需要安装。
支持哪些编程语言? 页面提到了 JavaScript 和 Python SDK。
它可以与 ROS2 配合使用吗? 可以。该平台宣称支持原生 ROS2 访问,包括主题、服务和参数。
它支持机器人导航和远程操控吗? 支持。来源提到了低延迟远程控制,以及用于航点和位姿导航的内置 Nav2 集成。
它只适合某一种用户吗? 不是。页面将其定位为面向机器人硬件 OEM、机器人开发者和研究团队。
替代方案
- 由单独的仿真器、仪表板、IDE 和 ROS 工具拼接而成的传统机器人开发栈。这些方案更灵活,但通常需要更多配置和集成工作。
- 本地 ROS2 开发环境。它们将所有内容保留在开发者机器上,但在开始工作前仍需要安装和配置。
- 通用远程设备控制或远程操控工具。它们可用于访问和操作,但不一定包含机器人专用的仿真、导航或 ROS2 工作流。
- 侧重仿真或车队运维的机器人云平台。根据产品不同,这些平台可能只覆盖工作流的一部分,而不是在一个基于浏览器的环境中将编码、可视化、控制和脚本编写整合起来。
替代品
Devin
Devin 是 AI 编程代理,帮助软件团队并行完成代码迁移与大规模重构子任务;工程师负责项目管理并批准改动。
AakarDev AI
AakarDev AI 是一个强大的平台,通过无缝的向量数据库集成简化 AI 应用程序的开发,实现快速部署和可扩展性。
Arduino VENTUNO Q
Arduino VENTUNO Q 边缘AI电脑,集成AI推理与微控制器确定性控制;用 Arduino App Lab 打通嵌入式、Linux与边缘AI开发。
imgcook
imgcook 是一款智能工具,只需单击一下即可将设计稿转换为高质量、可投入生产的代码。
open-codex-computer-use
open-codex-computer-use 是开源“电脑使用”服务的 MCP 服务器封装,让 AI 代理在 macOS/Linux/Windows 上执行桌面 GUI 操作。
Codex Plugins
使用 Codex Plugins 将技能、应用集成和 MCP 服务器打包成可复用工作流,扩展 Codex 访问 Gmail、Google Drive 与 Slack 等工具。